
Livox MID-360를 ROS에서 돌려보기
MID360
Livox MID-360
Ubuntu Livox MID-360
livox_ros_driver2
0. Livox SDK2
이전 포스트에서 Livox Viewer로 라이다 데이터를 확인해보는 것 까지 진행하였다. 이번 포스트에선 Livox ROS Driver2를 사용해 ROS에서 돌려보는 것을 진행할 것이다.
우선, Livox SDK2를 설치해야 한다. Livox-SDK2 github를 참고하여 빌드 및 설치를 진행한다.
$ git clone https://github.com/Livox-SDK/Livox-SDK2.git
$ cd Livox-SDK2
$ mkdir build
$ cd build
$ cmake ..
$ make -j
$ sudo make install
1. ROS Driver
ros workspace에 들어가 (livox_ros_driver2)[https://github.com/Livox-SDK/livox_ros_driver2]를 클론 한 후 빌드한다. 빌드 방법의 경우 github를 참고하면 된다.
$ cd (your_ros_workspace)/src
$ git clone https://github.com/Livox-SDK/livox_ros_driver2
$ cd livox_ros_driver2
$ ./build.sh ROS1
2. Config Setting & Run
1) Config
livox_ros_driver2의 경우, config에서 IP 설정을 해주어야 한다.
/config/MID360_config.json경로에 해당하는 파일을 보면 IP설정을 해주는 부분이 있다.
host_net_fino에 해당하는 IP주소들을 모두192.168.1.2로 변경한다. 만약 이전에 IP설정할떄 다른 IP주소로 설정하였다면 그 IP주소를 입력해주면 된다.lidar_configs에서ip값을 수정해야한다. Viwer에서 setting(톱니바퀴 모양)을 누른 후 LiDAR IP값을 입력해도 되고, broadcast code를 확인한 후(아래 사진 참고) IP값을 입력해도 된다. 만약, broadcast code가 47MDM5A0020442(14자리)라면 뒤에 두자리를 가져와192.168.1.1XX에서XX부분에 붙여넣으면 된다.
예를 들어, 47MDM5A0020442라면,192.168.1.142가 되는 것이다.
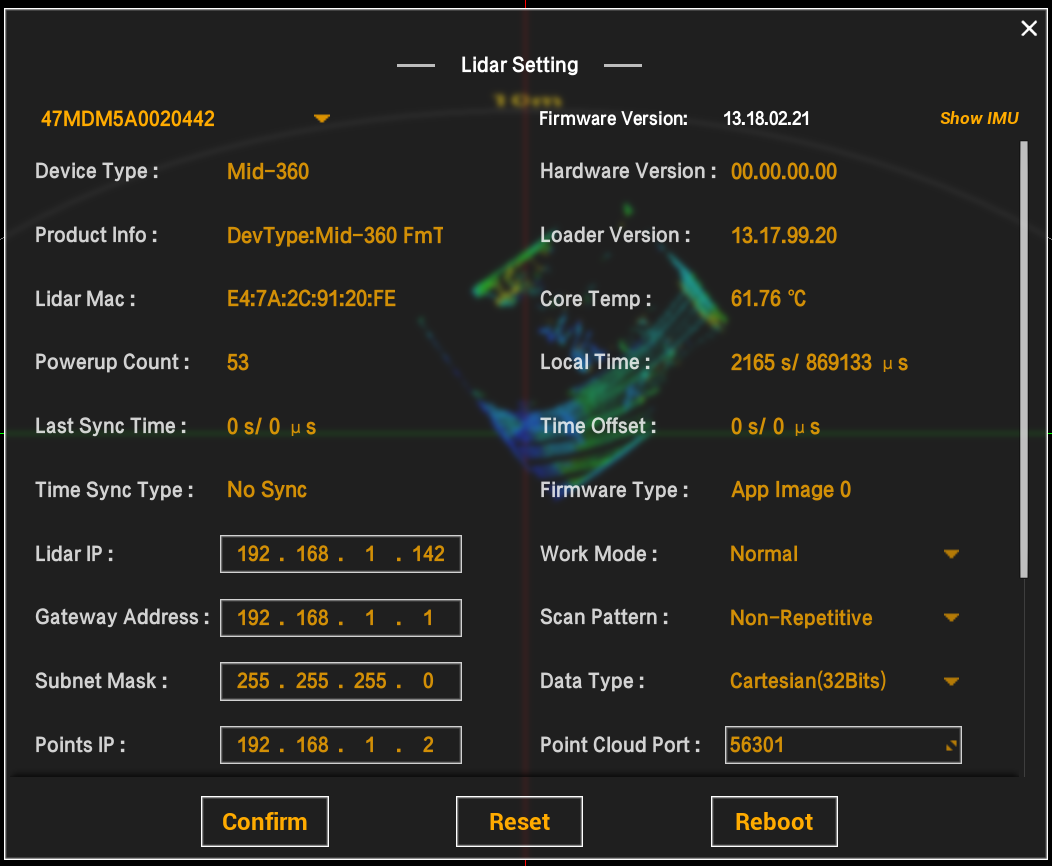

왼쪽은 Viewer에서 본 setting값이고, 오른쪽은 LiDAR에 붙어있는 broadcast code이다.
2) Run
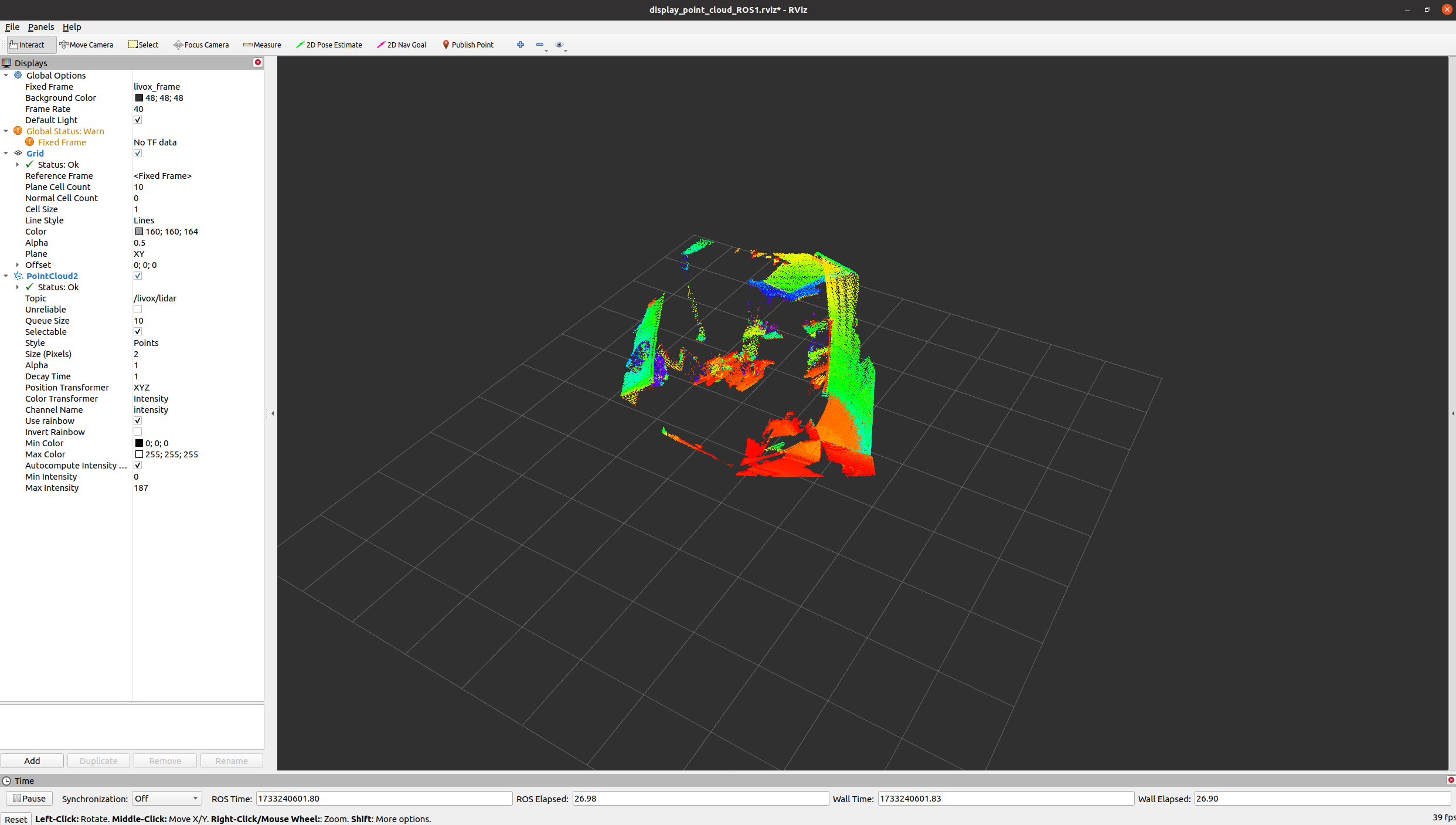
아래 명령어를 통해 LiDAR의 데이터가 나오는 것을 RVIZ에서 확인할 수 있다.
$ roslaunch livox_ros_driver2 rviz_MID360.launch
/launch_ROS1폴더에 있는 launch파일들을 보면, xfer_format이라는 파라미터가 있다. 0으로 설정하면, sensor_msgs/PointCloud2로 publish되고, 1로 설정하면 customized data로 publish된다.
보통 FAST-LIO2와 같은 패키지들은 기본적으로 customized data를 받아서 사용하므로, roslaunch livox_ros_driver2 msg_MID360.launch를 사용해 SLAM 알고리즘들을 돌리면 된다.
Leave a comment