
FLIR Machine Vision Camera를 ROS에서 돌려보기
FLIR Camera
Ubuntu FLIR Camera
FLIR ROS
0. SDK
이전 포스트에서 Spinnaker SDK를 설치하고 SpinView프로그램을 통해 카메라 이미지를 관찰하는 것 까지 진행하였다. 이번 포스트에선 flir_camera_driver를 사용해 ROS에서 돌려보는 것을 진행할 것이다.
1. ROS Driver
https://www.flirkorea.com/support-center/iis/machine-vision/application-note/using-ros-with-spinnaker/
위 링크에 ROS로 돌리는 법이 잘 나와있다. 아래 설명하는 방법은 위 공식 홈페이지에 나와있는 것을 해보는 과정을 작성한 것이다.
필요한 package들을 install한다.
$ sudo apt install ros-noetic-camera-info-manager ros-noetic-diagnostic-updater ros-noetic-dynamic-reconfigure ros-noetic-image-exposure-msgs ros-noetic-image-transport ros-noetic-nodelet ros-noetic-roscpp ros-noetic-sensor-msgs ros-noetic-wfov-camera-msgs
ROS 드라이버를 clone한다. 이 때, 나는 ROS noetic을 사용하기 때문에 noetic branch(noetic-devel)를 clone한다.
$ cd (your_ros_workspace)/src
$ git clone -b noetic-devel https://github.com/ros-drivers/flir_camera_driver.git
Build 진행
$ cd .. # go to your workspace directory
$ catkin_make
$ source ./devel/setup.bash
2. Run wiht ROS
카메라 연결 후, 실행해본다.
roslaunch spinnaker_camera_driver camera.launch
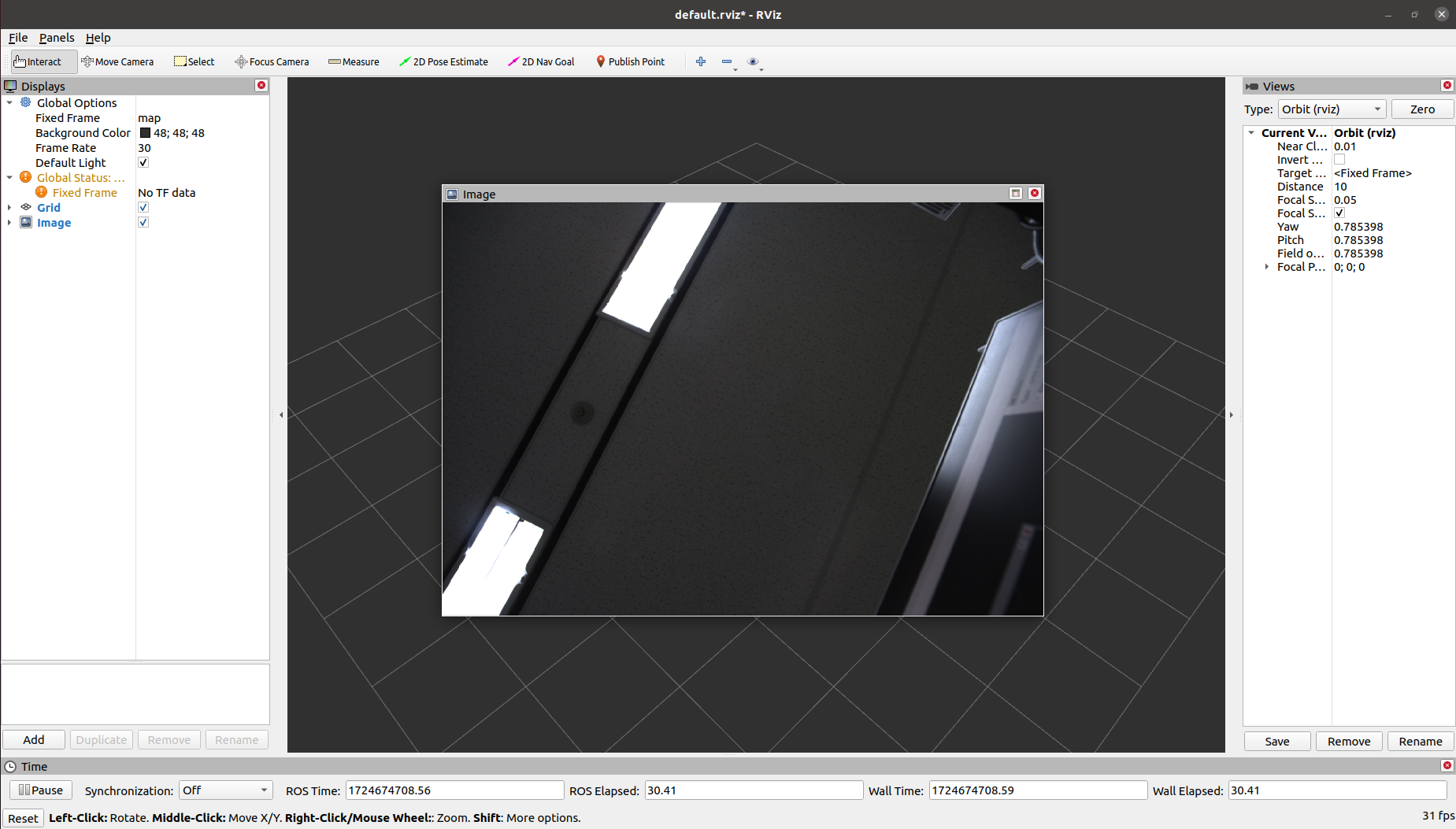
rviz로 본 결과는 아래와 같다.
Leave a comment